北航新闻网12月5日电(通讯员 刘亦泽)近日,能源与动力工程学院闫晓军教授和刘志伟副教授研究团队在微型动力领域再获重要进展。继今年5月8日北航机器昆虫研究成果登上Nature子刊后,近期北航机器昆虫又登上Science子刊。在北航机器昆虫BHMbot(BeiHang Microrobot)原型机的基础上,团队提出一种基于振动模态变换的机器昆虫“前跑”和“倒跑”控制方法,成功解决了微型机器昆虫进入狭窄封闭单向通道(宽度不足以实现转弯掉头)、原地无法快速后退的难题,实现了2cm微型机器昆虫的前进、后退双向快速运动、无线控制和传感器集成验证。日前,相关研究成果以“Forward and Backward Control of An Ultrafast Millimeter-Scale Microrobot via Vibration Mode Transition”为题在线发表于《科学•进展》(Science Advances)杂志。能源与动力工程学院闫晓军教授、刘志伟副教授、漆明净教授为通讯作者,能源与动力工程学院博士生喻贤、詹文成为第一作者,北京航空航天大学为第一完成单位。
微型机器昆虫具有尺寸小、运动灵活、可达性好等突出优势,在灾后救援、大型机械装备结构检测、信息获取等领域具有广泛应用前景。在上述实际应用场景中,微型机器昆虫往往需要在狭小空间内实现机动爬行,其一旦进入单向通行的“死胡同”,若通道宽度不足以让微型机器昆虫通过转弯掉头,其将面临进退两难的困境。针对这一挑战,团队在前期北航机器昆虫BHMbot原型机的基础上,针对微型动力系统前进、后退双向运动控制原理开展了科研攻关,研制了能够实现原地快速后退的新一代北航机器昆虫“BHMbot-B,BeiHang Microrobot-Backward”。
在这项研究中,研发团队根据BHMbot-B机器昆虫的新型动力系统结构,提出了一种基于振动模态变换的前进、后退控制方法,通过将动力系统的振动悬臂梁、传动铰链、仿生腿和机身的运动进行有机组合,巧妙运用振动悬臂梁一阶、二阶振动分别实现前进和后退运动。当悬臂梁处于一阶振动模式时,机身俯仰与前腿摆动同相,机器昆虫向前快跑;当悬臂梁处于二阶振动模式时,机身俯仰与前腿摆动反相,仿生机器昆虫实现快速“倒跑”(图1)。
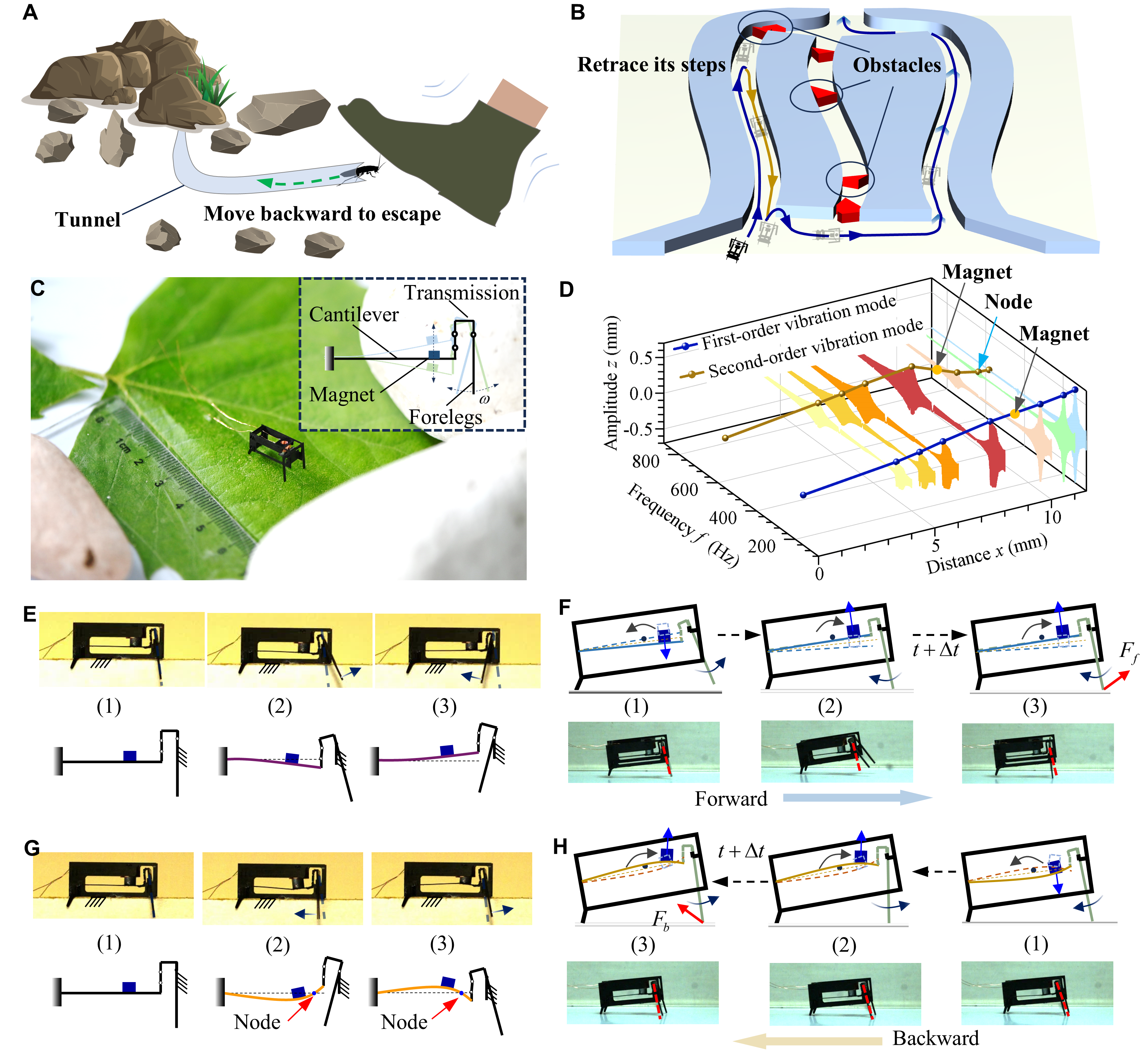
图1 BHMbot-B机器昆虫“前跑”、“倒跑”运动原理
得益于高效的动力设计,BHMbot-B同样可以实现与哺乳动物类似的仿生奔跑步态(BHMbot所采用的步态),带线状态下前跑速度能达到38.7倍体长每秒,倒跑速度能达到44.0倍体长每秒,双向爬行速度在同尺寸量级微型机器昆虫中均处于国际先进水平。此外,BHMbot-B机器昆虫的前进后退双向运动能力具有良好的环境适应性,可以适应多种不同粗糙度表面(视频1)、管道曲面、沙地地形与水下环境(视频2),为机器昆虫走向实际应用场景奠定了良好的技术基础(图2)。
适应多种不同粗糙度表面
管道曲面、沙地地形与水下环境
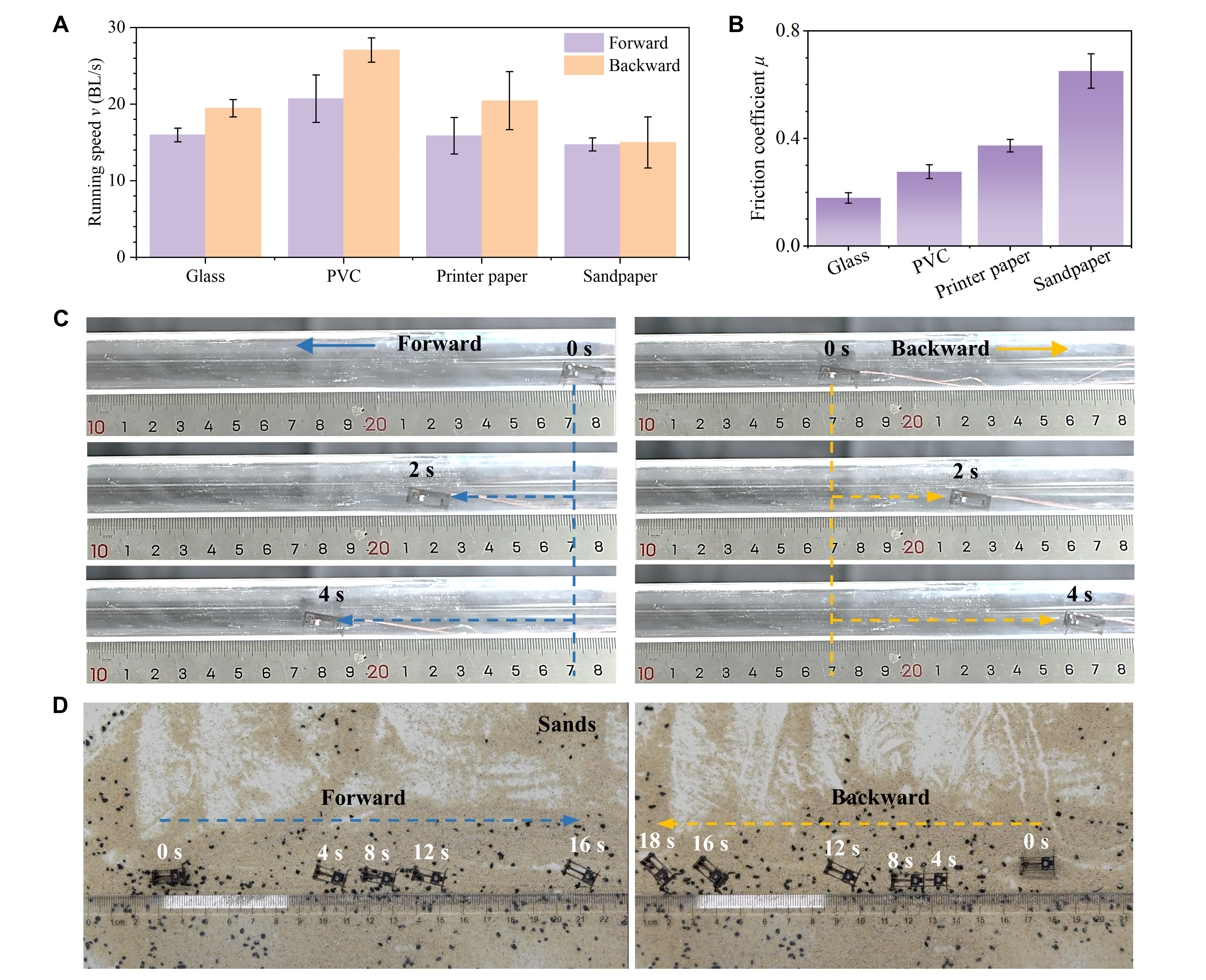
图2 BHMbot-B机器昆虫对不同表面与地形的适应性验证
针对机器昆虫的无线控制难题,本次研究针对BHMbot-B机器昆虫提出的前进后退控制方法与前期BHMbot采用的频率差分爬行方向控制方法具有良好的兼容性。在上述控制方法的基础上,团队研发了可调频带更宽的控制电路,BHMbot-B机器昆虫集成微型能源、控制和通讯模块后(身长2cm,质量1.89g),可通过无线控制实现前进后退双向爬行、左转和右转等基本运动,通过上述基本运动的组合,BHMbot-B机器昆虫可顺利退出狭窄封闭单向通道(图3,视频3)。
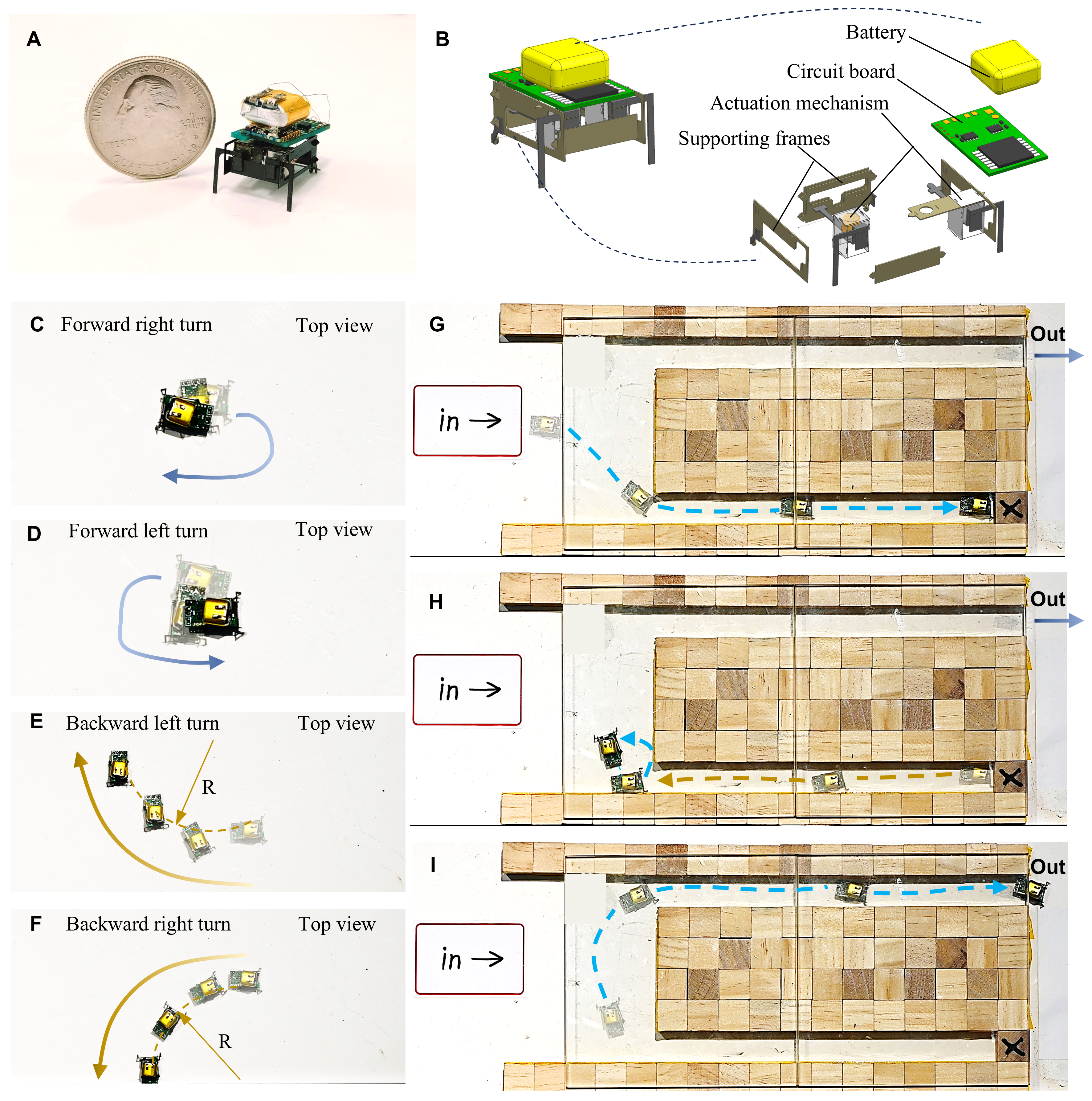
图3 BHMbot-B机器昆虫通过无线控制退出狭窄封闭单向通道功能验证
顺利退出狭窄封闭单向通道
面向大型机械装备结构损伤检测、信息获取等任务需求,本次研究集成验证了BHMbot-B机器昆虫携带摄像头、姿态传感器等任务负载的功能。在无线控制条件下,BHMbot-B机器昆虫可搭载微型摄像头采集高清图像;在集成陀螺仪元件后,BHMbot-B可实时回传自身姿态角参数,为后续开展基于姿态角参数的闭环控制奠定了基础(图4)。
未来,研究团队希望BHMbot-B机器昆虫能够朝着功能多样化、运动智能化的方向发展,实现吸附爬行、自主导航避障与自动返航等功能,同时通过集群方式为BHMbot-B机器昆虫引入冗余和容错能力,在协同合作机制下,高效完成任务。
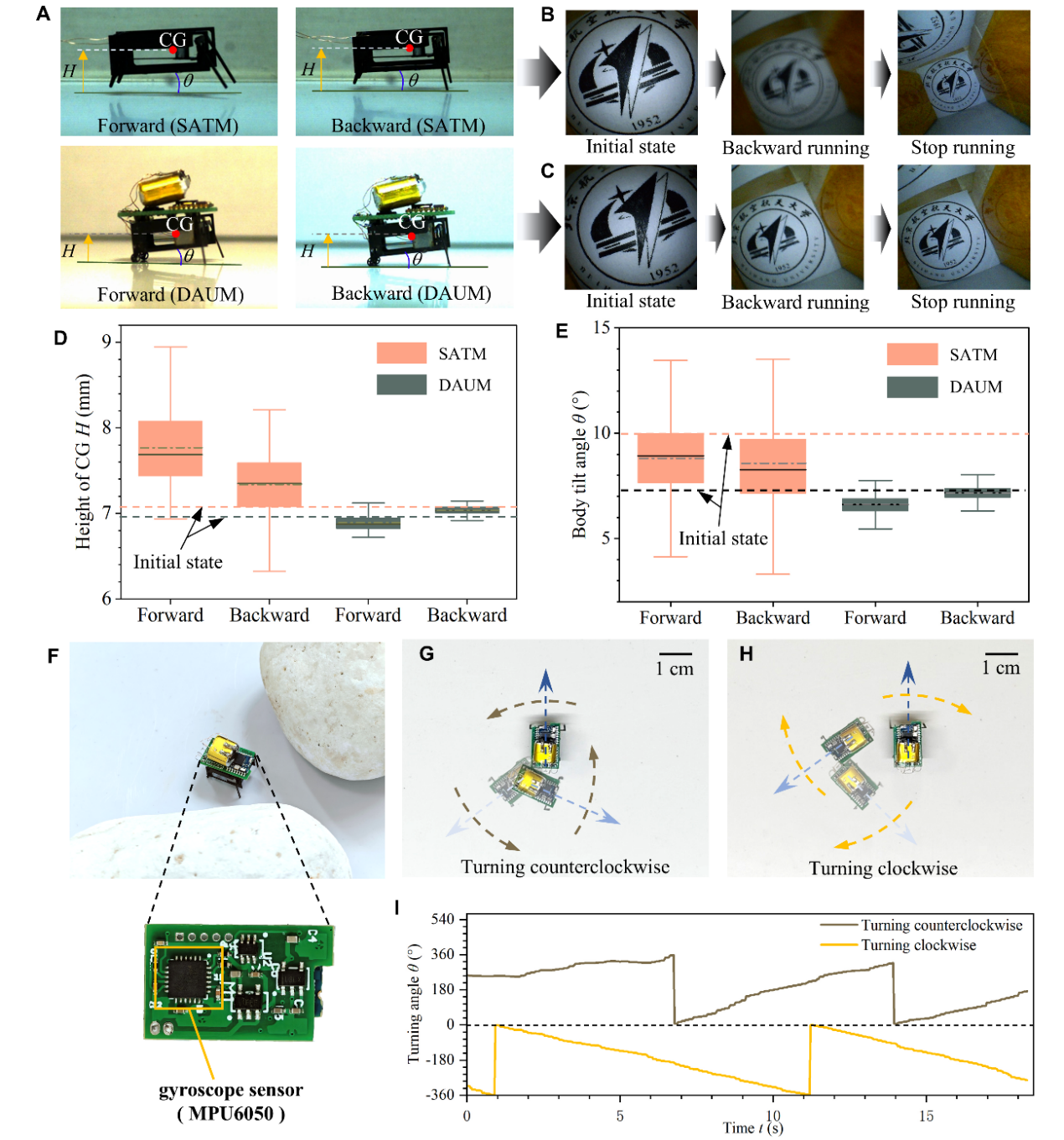
图4 BHMbot-B机器昆虫集成摄像头与传感器功能验证
附:论文作者简介
共同通讯作者

闫晓军 北京航空航天大学教授、博导
北航能源与动力工程学院院长,教育部先进航空发动机协同创新中心副主任,美国加州大学Berkeley分校访问学者。长期从事飞行器动力装置相关基础研究,在Nature, Science Robotics, Science Advances, Nature Communications, International Journal of Plasticity等期刊发表SCI论文80余篇,EI论文60余篇,授权国家发明专利35项。获全国百篇优秀博士论文、教育部新世纪优秀人才、教育部科技进步二等奖、湖南省国防科技进步一等奖、首届“航空强国中国心”教育基金突出贡献奖特等奖等。

刘志伟 北京航空航天大学副教授、博导
北航能源与动力工程学院院长助理,入选2024年北京市青年人才托举计划。主要从事昆虫尺寸微型仿生机器人、氢能航空电推进等相关研究,在Nature, Science Advances, Nature Communications, IEEE Transactions on Robotics, Applied Energy, International Journal of Mechanical Sciences 等国际期刊发表SCI论文40余篇,受邀在IEEE MEMS 国际会议做大会报告2次,授权国家发明专利15项,承担博士后科学基金面上项目、国家自然科学基金青年项目、北京市自然基金面上项目、北航青年拔尖人才支持计划等纵向课题。

漆明净 北京航空航天大学教授、博导
北京航空航天大学教务部副部长,美国加州大学Berkeley分校博士后。长期从事微型机器人的推进与控制研究,在Nature、Science Robotics、Nature Communications、Science Advances、IEEE Transactions on Robotics等高水平期刊发表论文60余篇,授权发明专利20余项。主持国家自然科学基金面上项目、青年项目以及某工程创新特区项目,入选留学基金委“未来科学家”计划。担任Nature正刊审稿人,教育部第五轮学科评估专家。
共同第一作者

喻贤 北京航空航天大学2022级博士生
博士生导师为闫晓军教授、刘志伟副教授。研究方向为微型机器人动力与控制,在Science Advances和Chinese Journal of Aeronautics等国际期刊发表SCI论文2篇,受理国家发明专利4项。

詹文成 北京航空航天大学2019级博士生
博士生导师为闫晓军教授、刘志伟副教授。研究方向为微型机器人动力与控制,在Science Advances, Nature Communications, Measurement 和IEEE Robotics and Automation Letter等国际期刊发表SCI论文8篇,受理国家发明专利2项。
(审核:董卓宁)
编辑:贾爱平