北航新闻网9月21日电(记者 史越)多姿多彩的大自然,总能给人类无穷无尽的灵感,因而造就了很多科学技术的发明。人们模仿生物的特殊本领,利用生物结构和功能原理,研制机械或各种新技术,这就是仿生学。而今,又一项精彩的仿生学成果在北航诞生了。
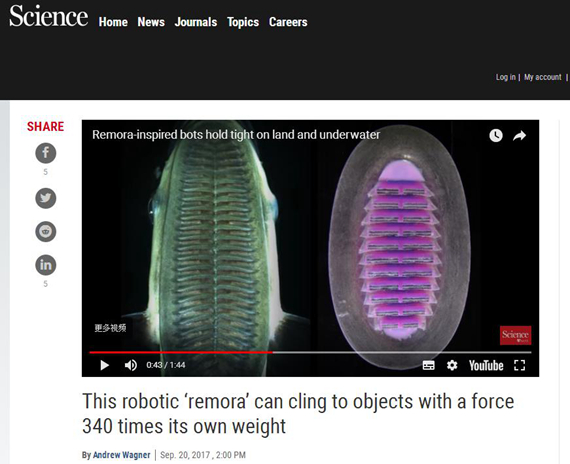
9月21日,国际顶级期刊《科学》(Science)杂志机器人子刊《科学·机器人学》(Science Robotics)以长篇封面报道刊登北京航空航天大学文力副教授课题组牵头、与哈佛大学合作的科研团队最新研究成果——仿生䲟鱼软体吸盘机器人。北京航空航天大学为该论文的第一单位、通讯单位。这也是我国在《科学·机器人学》上发表的首篇论文。杂志官方通过图文、多媒体两种形式详细撰文介绍了该项研究。
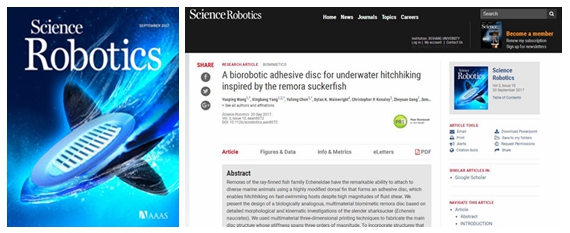
《Science Robotics》论文封面及截图
从一张图片得到灵感,前后耗时四年,攻克三大难关……文力把一台小小的机器人放在掌心,娓娓道来一段精彩的科研故事。
好奇心始自一张图片
人们常常感叹于造物主的神奇。在浩瀚的海洋里,有一种身体细长的䲟鱼,在漫长的进化中,它的第一背鳍变成吸盘,从而可以吸附在船底和鲨鱼、鳐鱼、鲸鱼等其他大鱼身上远游和索食,被形象地称为“搭顺风车”。在很多海洋大型鱼类的图片中,紧紧吸附的䲟鱼身影十分常见。

海洋中的䲟鱼(图片来自网络)
看到这样一张图片时,文力正在从事3D打印鲨鱼皮的研究。他的目光立刻被鲨鱼身上这种体态奇特的小鱼吸引住了。
“这种‘搭便车’行为最大的优点,就是能有效减少运动消耗的能量。”文力回忆,一直从事仿生软体机器人研究的他当即对此产生了兴趣,并隐约感到其中存在巨大的应用空间。他当即在谷歌上搜索了关于䲟鱼的吸附机理和仿生应用研究,发现“基本是一片空白”,这一年是2013年。
早在古希腊时期,先哲亚里士多德就在著作中记载了壁虎的爬行现象。现在,科学家们已经发现壁虎脚对垂直表面的超强粘附力来自于分子间的范德华力,并产生了诸多仿生学应用,研究相对透彻。但是,范德华力在水下的作用有限,水生生物如何实现超强吸附?“水下壁虎”䲟鱼的吸盘是如何发挥作用、又能怎样应用于人类生产生活?文力下定决心一探究竟。
于是,文力的团队从中国福建以及南海区域购买了多批䲟鱼,小心地空运回北京。在实验室,他们人工创设出海水环境,架设起一系列观察研究设备。对运输过程中死亡的鱼,也做了全方位的解剖和分析,弄清了䲟鱼的身体结构。于是,团队决定投入制作仿生机器人,真正的挑战开始了。
逐步攻克“三大难关”
谈起仿生机器人的研制过程,当时无数个不眠夜,今天谈来已是云淡风轻。文力说,团队先后遭遇了“三大难关”,这也是如今样机成品上的三个核心技术。
䲟鱼头部吸盘的结构十分精妙复杂,被生物学家称作“脊椎动物解剖学上最奇妙的结构之一”。课题组遭遇的第一个难关就出现在吸盘的制作上。
此前,利用环扫电镜、Micro CT、高速相机同步运动追踪等生物测量手段,课题组获得了䲟鱼吸盘的宏观与微尺度结构、运动模式。他们发现,䲟鱼头部吸盘主要由三部分组成:吸盘外周的唇圈,由柔性的肌原纤维组成,主要产生负压;吸盘内部的硬质鳍片结构,外表包裹厚度约500微米的软组织,可由肌肉驱动产生法向微动;鳍片上的锥状小刺结构,底部直径约200微米,顶端为1-5微米。
有了这些数据,如何制作吸盘模型?文力第一时间想到了利用3D打印技术,但吸盘结构精妙,硬软兼备,常规的单一材料3D打印无法实现。
“如果只是简单地把硬质软质结构拼接起来,应力强度一大就会迅速疲劳并破碎。”文力说,课题组借鉴参考了多种脊椎动物的机体连结结构,前后耗时约一年,终于突破技术难关,利用复合多材料3D打印实现一体化样机成形。吸盘样机材料的刚度逐级梯度地跨越了3个数量级(相当于从人体的皮肤到骨骼硬度变化),这项技术还申请了国家发明专利。尽管如此,课题组还参照䲟鱼的真实比例,适度加宽了软体唇圈部分,使样机能产生更强的吸附力。
仿生软体䲟鱼吸盘与生物吸盘对比(Science/AAAS Multimedia News截图)
第二个难关出在复制鳍片上精微的锥状小刺结构。通过形态学测量,课题组发现,在每个䲟鱼的吸盘上约有2000个这样的小刺。这种结构究竟有什么作用?通过不间断的观察探究,他们终于发现了其中的奥妙。
原来,䲟鱼吸盘上的这种小刺能够自由调控吸附力的大小。一般情况下,当吸盘吸附在物体表面时,会产生较大的法向力,但是切向力并不大。小刺处于放松状态时,吸附力小,脱落也相对容易。而当小刺与吸附表面接触时,就会同时产生较大的切向摩擦力,从而牢牢吸在物体表面。对于这种调控机制,文力表示:“肌肉的运动需要消耗能量,当驱动小刺的肌肉放松时,能量消耗会显著减少,这是生物体具备的一种智能调控特性。”
那么,问题来了,哪种材料既轻、强度又高,还能牢固嵌入鳍片中?经过反复研究比较,文力选择了碳纤维材料。但是要加工出如此微小的纤维结构并不容易,课题组和哈佛大学Robert Wood实验室一起攻关,借助该实验室的高精度激光加工技术,在几个月里不断修改设计方案,终于加工出了尺度、形状都和真实䲟鱼结构高度近似的硬质小刺,并嵌入到复合材料的样机鳍片中。
仿生机器人吸盘上的小刺结构(文力供图)
样机做好了,万事俱备只欠东风,最后一个难题就是,怎么让机器人动起来?传统的电机重量/输出力比例远远低于生物,且不适合驱动这样微小的鳍片结构运动。为此,课题组制作了轻量化、防水的纤维增强软体直线驱动器,实现了䲟鱼吸盘内部鳍片的微动,幅度约为150微米。
“通过这三项关键技术,我们成功实现了机器人样机能够像真正的䲟鱼一样牢牢吸附在物体表面,并且通过内部鳍片的主动抬起运动显著增大摩擦力。”文力无不感慨地说,“在此之前,整整四年,䲟鱼项目上我们未发表一篇学术论文”。
仿生应用前景可观
䲟鱼吸盘之所以有很好的仿生学应用前景,主要体现在两方面:其一是通过吸附节省在水下的动力;其二是自动调节吸附力的大小。
文力介绍,因其超强的吸附力,早年间渔民在䲟鱼尾部牵一根线,用来钓海龟。现在,课题组做出的仿生䲟鱼软体吸盘机器人样机,能在光滑表面产生相当于自重约340倍、粗糙表面上自重约100倍的吸附力。同时,课题组首次揭示了吸盘内部鳍片的主动抬起运动可显著增大吸盘与吸附表面的摩擦力,鳍片上硬质小刺和软组织的协同作用使吸盘能够适应不同粗糙度的表面等机理。
“通过将仿生样机集成到水下机器人上,实现类似䲟鱼的游动-吸附-脱离。这项研究工作不但从生物力学角度揭示䲟鱼的吸附机制,同时为未来的低功耗水下仿生软体机器人、水下吸附装置提供了新的思路。”文力说,基于生物体机制,这种机器人虽然吸附力可观,却不会对吸附表面造成破坏。该项应用在军民领域都有良好的应用前景,如国防科技,水下救援、海洋生态检测等方面,可发挥重要作用。
文力和仿生䲟鱼软体吸盘机器人
事实上,这已不是文力领衔的课题组第一次做出优秀的仿生机器人。今年3月,北航ITR软体机器人实验室与国际著名机器人与自动化公司FESTO合作研制的“软体章鱼触手机器人”发布,并在汉诺威工业展上获得了德国总理默克尔的青睐。项目负责人也是文力。这种机器人能为不同形状、大小的物体完成安全无损和有力的抓取,突破了刚性机器人的部分先天缺陷。值得一提的是,软体章鱼触手的部分关键技术,同样对䲟鱼仿生软体机器人的加工起到重要作用。
一项学术成果的取得,离不开团队的共同努力,文力说,自己的研究生、北航机械学院2015级硕士王越平,博士后杨兴帮、哈佛大学Yufeng Chen博士,是这篇论文的共同第一作者。北航材料学院管娟副教授,化学学院刘欢教授为研究提供了材料动态性能测量、表面微观结构等方面的数据;哈佛大学Lauder实验室的Dylan Wainwright与Chris Kanaley提供了䲟鱼吸盘的断层扫描数据;哈佛大学Robert Wood实验室则制作了微激光加工碳纤维小刺;北航机械学院王田苗教授参与项目论证并提供宝贵建议。
“得益于北航提供的优质科研环境和平台,我们能够不断取得突破,这次成果登上《科学》系列杂志封面,也是对我们目前工作的一个阶段性的认可。”文力说,自己的课题组会再接再厉,未来依然任重道远,同时也相信北航会产生更多重量级的科研成果。
编辑:史越