北航新闻网1月14日电(航宣)日前,北航自动化科学与电气工程学院可靠飞行控制团队柯晨旭博士、蔡开元教授和全权教授设计了一种统一的被动容灾控制算法,保证了四旋翼飞行器在大比例旋翼完全失效情况下无人机的安全飞行,提高了四旋翼飞行器的可靠性,并能拓展应用到六旋翼、八旋翼等飞行器上。相关成果以“Uniform Passive Fault-Tolerant Control of a Quadcopter with One, Two, or Three Rotor Failure”为题,发表在《IEEE Transactions on Robotics》上。北航柯晨旭博士为论文的的第一作者,蔡开元教授为论文的第二作者,全权教授为论文的通讯作者。工作受国家自然科学基金支持,北航为研究论文的唯一单位。
说起无人机,人们可谓耳熟能详。其中,多旋翼飞行器、尤其是四旋翼飞行器是无人机的主流,可以在无人驾驶的条件下完成复杂空中飞行任务和搭载各种负载任务,被看作是“空中机器人”。巡视自然、守护生命、航拍万物、高空作业……在航拍、植保、监测、巡检、物流、载人等各个领域,无人机正发挥着不可或缺的作用。

图1:DJI Mini 4 Pro(图源大疆官网)
然而,多旋翼飞行器的关键部件——作为执行机构的螺旋桨和电机,在实际运行过程中会受到各种外界环境的影响,例如高温、风沙、日晒、雨水、腐蚀、碰撞等,突发故障时有发生,进而导致飞行器失控坠机。随着近年来无人机的广泛应用,失控坠机危及人民群众财产和安全的事件也时有发生。由于四旋翼飞行器的旋翼不存在冗余,这种威胁更显得尤为突出。
在旋翼发生故障后,如何最大限度地保证飞行器安全飞行?研究团队瞄准这一领域开展了研究。就提高四旋翼飞行器的可靠性问题,利用剩余可用旋翼,增加容错控制设计是一种重要的手段。这种手段的优点在于,不需要对四旋翼飞行器进行硬件上的调整,仅仅依靠控制设计便可提高四旋翼飞行器的安全性和容错性。在容错控制的应用中,需要设计算法,完成检测故障、定位故障和程度、根据故障进行控制重构三个步骤。

图2:容错控制算法设计步骤
飞行情境复杂繁琐,而又瞬息万变,这一过程的实现显得尤为艰难,对于过程耗时、故障诊断和控制器结构要求严格:如果检测故障、定位故障和程度耗时过长,那么控制器将不能快速进入控制重构状态,飞行器坠机会先行一步;故障诊断同样不容失误,一旦定位故障位置和故障程度的结果与实际情况存在偏差,控制重构将无法正确执行,无法有效解决飞行器故障带来的坠机问题;控制器结构也应“面面俱到”,为了让容错控制器能够最大程度覆盖各种执行机构故障情形,需要针对所有可能的故障情境来设计不同的控制策略,但这样便使得控制器程序复杂,维护难度大大增加。
面对重重困难,团队逢山开路、遇水架桥,在容错飞行控制和算法验证上取得了重要突破,成功地设计出一种统一的被动容灾控制算法。在实际应用中,该算法还可以轻松拓展到如六旋翼、八旋翼这种旋翼数量更多的飞行器上。
四旋翼飞行器的任一旋翼失效,将直接导致飞行器受力不平衡,无法保持安全飞行姿态。以往的解决方法是预先计算不同旋翼故障的平衡点,据此进行不同的控制,这要求针对不同情况进行单独设计,并且需要在不同的情况下切换不同的控制器。但是实际生活中四旋翼飞行器可能遇到的执行机构故障多种多样,难以穷尽,针对每一种故障情形设计不同的控制策略是不现实的。
究其根本、溯其源头,团队选择回归到最原始的飞行状态寻求解决方案。正如陀螺转动是旋转前行,当部分旋翼发生故障停滞不前时,飞行器的平衡被打破,也会进入旋转状态。如若顺势而为,不去检测、诊断复杂多变的故障情形,而是依靠剩余旋翼维持稳定的旋转状态,从而实现像陀螺一般飞行。

由此,团队另辟蹊径,归纳出四旋翼飞行器执行机构发生故障后的受力特点,针对该特点进行了容错控制设计。最终,团队设计出的容错控制方法能够在不依赖故障检测、故障诊断的情况下,自主地实现不同执行机构故障下的容错控制,避免飞行器坠机。
实验验证是四旋翼飞行器容错控制研究的一大难点。相较于其他控制算法研究,容错控制研究在验证测试阶段极易造成飞行器坠毁。一旦坠毁,前期投入的资源便付诸东流,这就导致验证工作需要消耗大量的人力物力,设计出一套成熟的容错控制算法往往成本高昂。同时,飞行转台一类的飞行模拟测试设备通常也具有测试复杂、灵活性低、费用昂贵的特点。
针对这一痛点,团队开发了一整套实时硬件在线仿真测试平台,该平台成本低廉、具备满足容错控制研究的仿真精度,且灵活性强。相较于传统容错控制方法,被动容灾控制算法在容灾、被动和统一这几方面表现突出。
容灾能力突出。这种被动容灾控制算法在理论上通过了稳定性证明,同时在户外的实践检验中,效果也十分显著。在最糟糕的情况下,三个螺旋桨完全失去动力,四旋翼飞行器依旧具备一定的方位控制能力,确保飞行器能够安全地飞行和降落。这是世界上首次在户外成功做到的、故障程度最严重的四旋翼飞行验证。
对故障信息依赖性小。控制方法不依赖旋翼的故障检测与诊断结果就可发挥作用,也不依赖于具体的故障信息。利用这种被动容灾控制算法,旋翼故障被建模为一个集总扰动,估计的扰动会被统一被动故障容错控制所采用,避开了获取每个旋翼的具体故障信息所带来的问题。然而,如果对集中扰动进行完全补偿,无法保证在两个或三个旋翼故障的情况下飞行器的稳定性。通过引入期望旋翼推力的反馈从而实现部分集总扰动的补偿,保证了具有多个旋翼故障的四旋翼飞行器的稳定性。
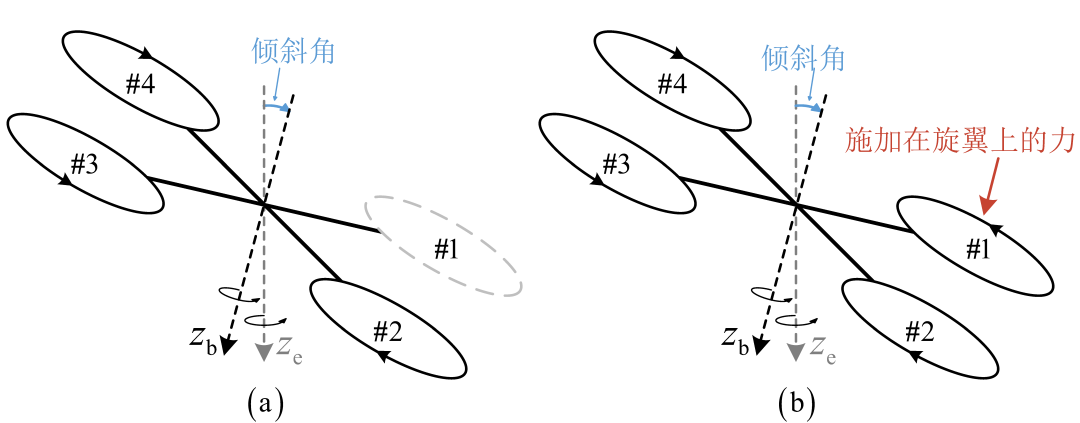
图3:飞行器被动控制原理图
统一适用于多类场景。对正常及不同故障的四旋翼飞行器,利用团队设计的这种算法可以使用完全相同的控制器来实现控制。由于不需要针对不同的旋翼故障场景设计不同的容错控制器,整体控制器设计过程得到了简化。
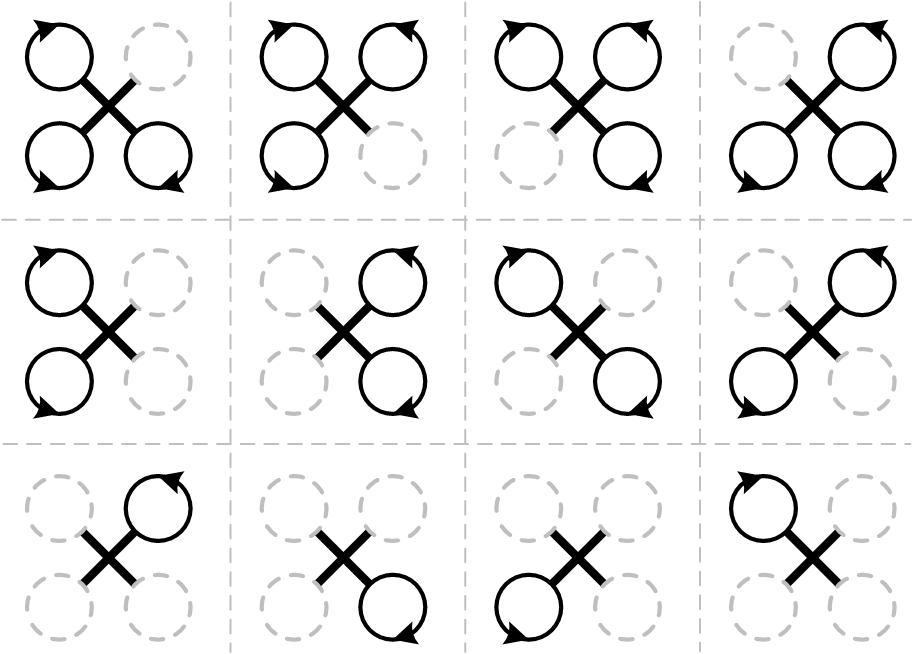
图4:无需控制切换即可应对多种失效情况
针对单旋翼、相邻双旋翼、对角双旋翼以及三旋翼故障的飞行情境,团队创造的统一被动容错算法不仅完成了仿真平台的室内测试,更创造了户外故障程度最严重的四旋翼飞行验证的历史。在无人机、低空经济越发火热的大势所趋下,如何提高无人机的安全性和可靠性,该研究给我们提供了一个答案。
论文的原文链接:https://ieeexplore.ieee.org/document/10197544
(审核:李建伟)
编辑:贾爱平