北航新闻网4月26日电(通讯员 浦克)2023年4月15日晚,自动化科学与电气工程学院“云上博论”——“基于虚拟管道的集群控制研讨班”第四讲举办。基于虚拟管道(VirtualTube)的集群控制技术是最近用于群体机器人的集群控制方法。具体地,所有机器人共享相同的预先规划好的虚拟管道,使用相同的分布式控制器进行集群协调。虚拟管道内没有障碍物,机器人只需要保证个体间以及与管道边界不发生碰撞即可。与编队控制相比,虚拟管道控制不需要机器人ID和编队,这放宽了对于相对位置准确性的需求。与规划方法相比,虚拟管道规划不同于轨迹规划,只需规划一条虚拟管道,这极大降低了计算复杂度。
研讨班第四讲基于北航可靠飞行控制研究组负责人全权教授、北航可靠飞行控制组博士生毛鹏达的研究成果展开,主题为“面向机器人集群的正则管道规划”。
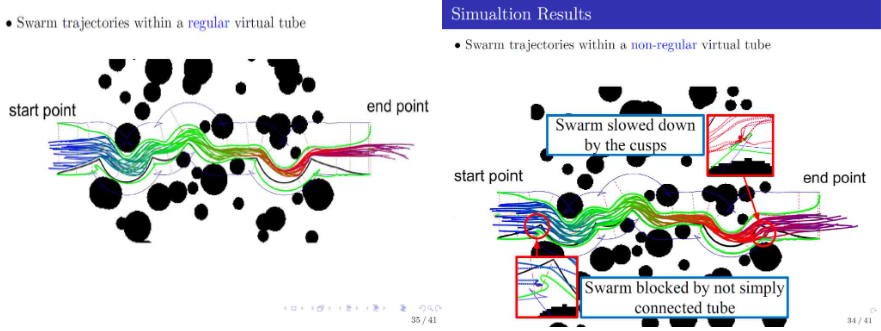
近年来,随着无人机、机器人相关技术的发展,集群分布式控制越来越受到人们的关注,常见的方法包括编队控制、集群协同轨迹规划等。基于传统的群集(flocking)控制方法,北航可靠飞行控制组创新性地提出了正则虚拟管道规划的概念。本次讨论班主要对有生成线的虚拟管道进行定义,并分析管道的相关性质,介绍适用于集群飞行的正则虚拟管道及规划方法,最后展示仿真对比结果。

本次分享为研讨班的第四期,聚焦于面向机器人集群的正则管道规划。本期讲座促进了该领域学术交流,拓宽了学生的科研思路,增强了学生的科研兴趣。
(审核:王少萍)
编辑:任和