研究背景
近年来,地震、森林火灾等自然灾害频发,无人机凭借其高机动性和灵活性特点,在灾后人员搜救任务中得到了广泛应用。单无人机由于载荷能力有限,难以同时携带多种设备并完成复杂环境下的监测与搜救任务。为此,多无人机协同搜救已成为提升搜救效率的主流趋势。然而,现有路径规划算法在全局搜索能力与局部优化效率之间难以平衡,导致在复杂地形下的搜救覆盖率提升有限。
为解决上述问题,本文提出了一种基于地标算子的改进蜣螂优化算法(Landmark Operator Dung Beetle Optimization, LODBO)。该算法提出3种创新点:
1)通过使用Tent映射提高了种群分布的均匀性和多样性,增强了全局搜索能力;
2)通过引入地标算子,优化了蜣螂的运动策略,提升了搜索空间覆盖率和收敛速度;
3)通过采用自适应因子,平衡了全局探索与局部开发能力,避免了局部最优问题。
实验结果表明,LODBO算法在复杂地形下的执行效果优于原始的蜣螂优化算法算法,为多无人机协同搜救提供了高效的解决方案。
研究亮点
由于无人机的续航能力有限,为了确保高效执行救援任务,往往需要在基地与目标区域之间设置若干个中继站作为中转点。如图1展示了多无人机搜救覆盖任务的示意图。图中清晰地描绘了两架无人机(UAV1和UAV2)从基地出发,经过中继站,最终覆盖受灾区域的飞行路径。无人机的基地作为任务的起点和终点,是无人机执行任务的出发和返回点。受灾区域则是无人机需要覆盖和搜索的目标区域,通常根据灾情的严重程度和救援优先级进行划分。
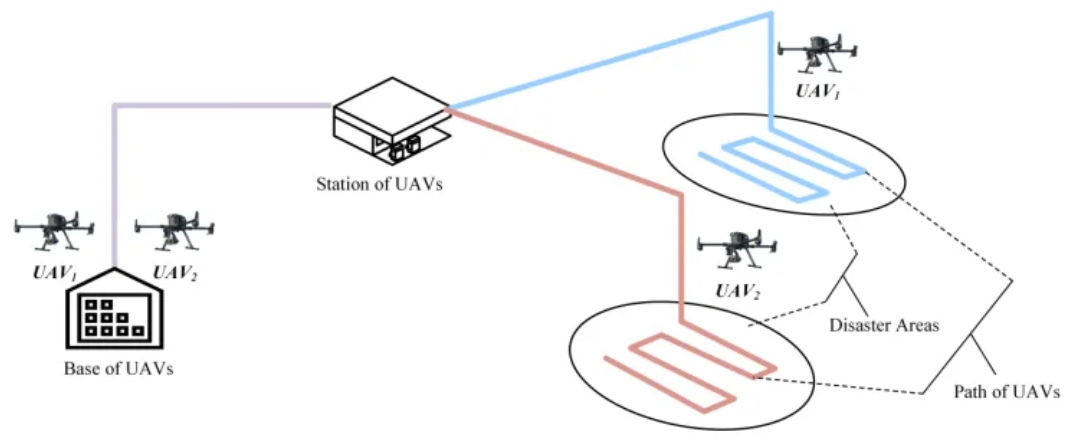
图1 多无人机搜救示意图
由于地震灾区面积广阔,在进行救援路径规划之前,需要先对环境数据进行预处理以确定无人机的巡逻路径。本文首先对受灾环境进行建模,并根据无人机视野是否受阻及是否超出最远通信距离的约束条件,将受灾区域划分为4个重点搜救区域。然后,对重点搜救区域进行网格划分得到无人机巡逻点的分布情况。确定任务所需的巡逻点后,需要分配无人机的数量并规划其飞行路线。由于任务区被划分为4个区域,选择4架无人机根据任务负荷和时间约束在每个区域各分配1架无人机。分配后的多无人机巡逻点如图2所示。
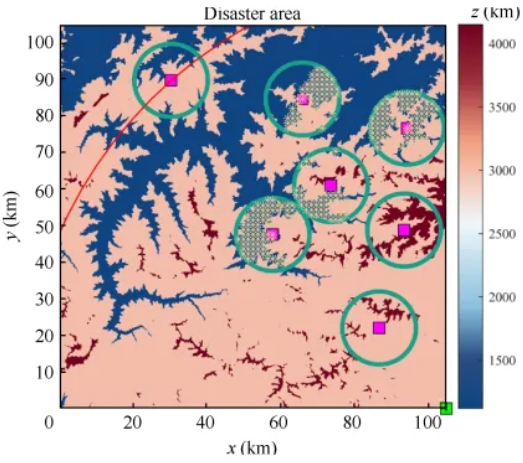
图2 多无人机灾区巡逻点示意图
考虑到无人机飞行距离有限,在无人机基地与重点搜索区域之间设置不同数量的中继站,将会影响路径规划任务的优化效果,本文探讨了设置不同中继站数量Jo( 其中O= 1 , 2 , 3)共3个中继站对无人机执行搜救任务的影响,仿真结果如图3所示。
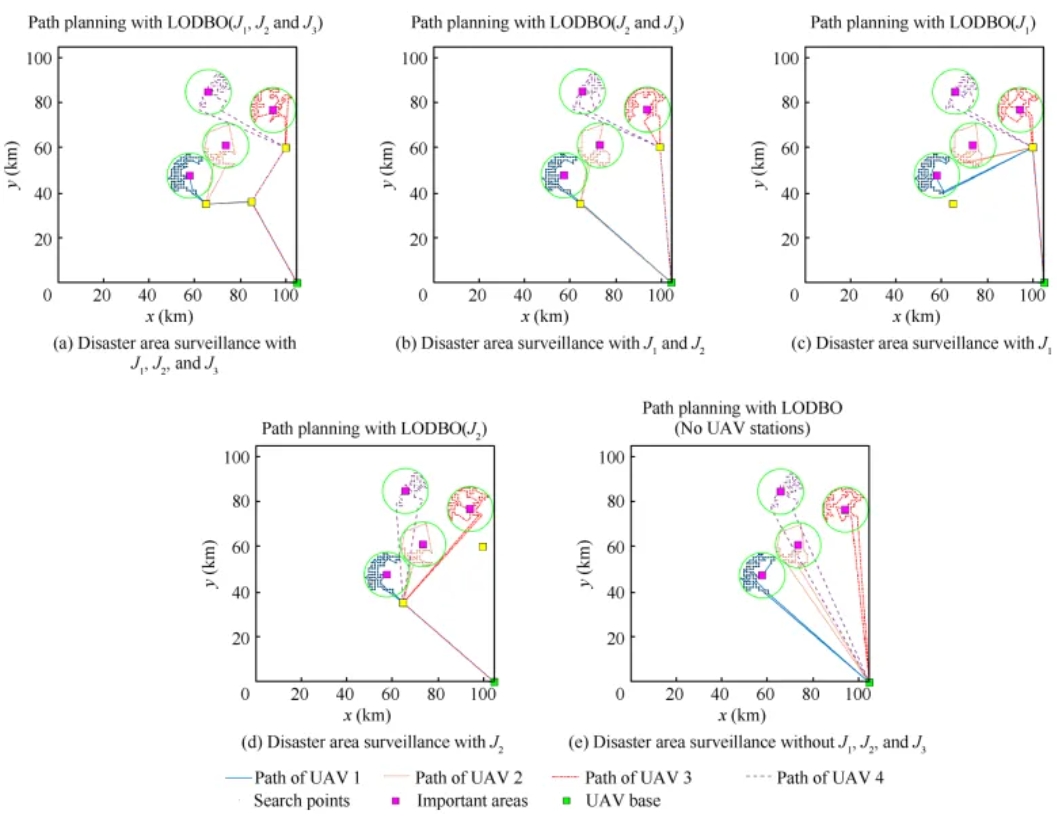
图3 使用LODBO算法在不同数量中转站进行路径规划的仿真结果示意图
最后,将LODBO算法生成的最优路径在三维环境中展示,如图4所示。
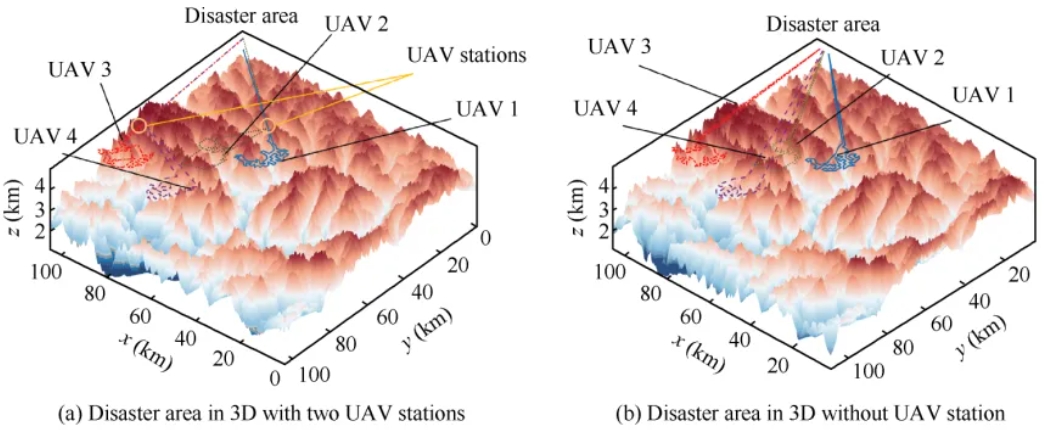
图4 三维空间下无人机搜救环境展示
为了验证所提LODBO算法的有效性,本文将该算法与蜣螂优化算法( DBO )、鲸鱼优化算法( WOA )、灰狼优化算法( GWO ) 和遗传算法( GA )在同一设置下进行仿真对比实验,仿真结果如图5所示。结果表明,LODBO算法在最优适应度函数值上均优于遗传算法(GA)、灰狼优化(GWO)等传统算法。最优路径较原始DBO算法缩短了10.47%,计算时间降低16.99%。

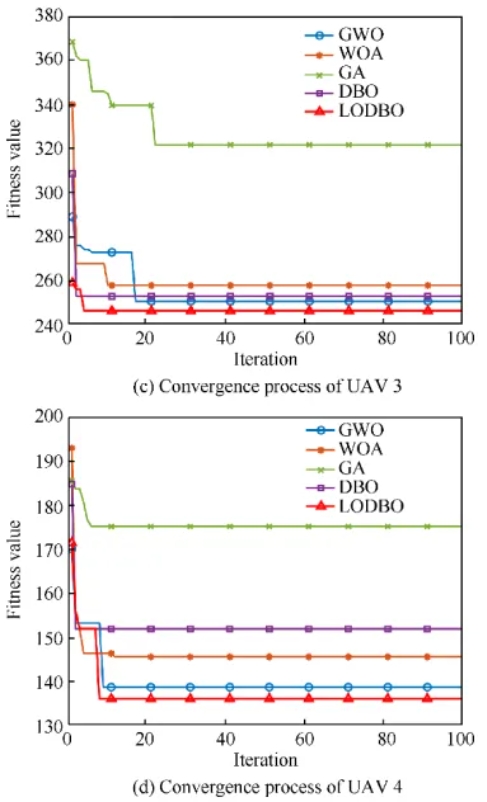
图5 不同算法对比适应度函数值
LODBO算法的可调节的参数包括地图因子Rt。因此,对该参数进行了敏感性分析。这些参数的参数空间定义为Rt∈{ 1,2,…,10 }。同时,为了验证本文提出的不同改进策略的独立有效性,将DBO与本文提出的3种改进方法进行集成,得到了3种不同的算法:
DBO与初始种群的TENT映射策略相结合得到的LODBO1算法;将DBO与地标算子结合得到LODBO2算法;将DBO与自适应参数调节相结合得到的LODBO3。
通过实验将DBO与LODBO1、LODBO2、LODBO3和LODBO四种改进算法进行比较。在这些仿真实验中,基于相同的初始条件组合,每次只改变一个参数,实验重复10次,结果如图6所示。从图中可以看出,算法最优适应度函数值会随参数的取值而变化。当取值为8时,在10次实验中取得了令人满意的效果,其中参数的确定值在这些图中用黑色圆圈标出。同时,通过与其他3种改进方法进行对比,证明了LODBO算法的各个改进部分都是有效的。
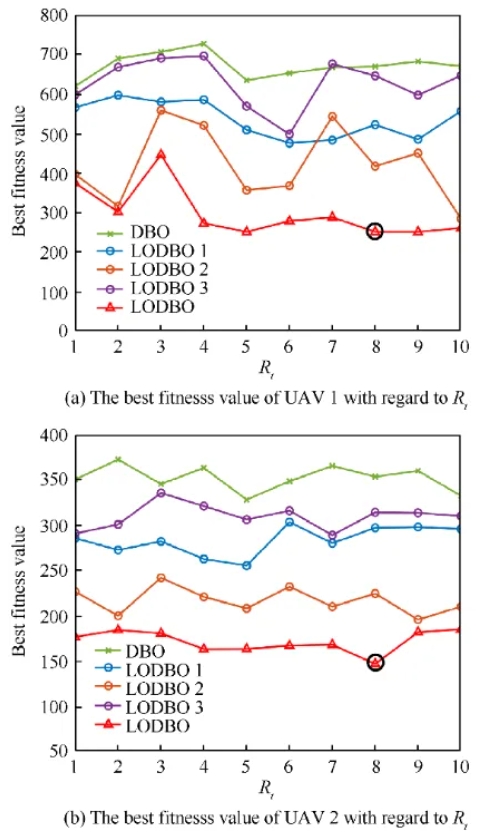
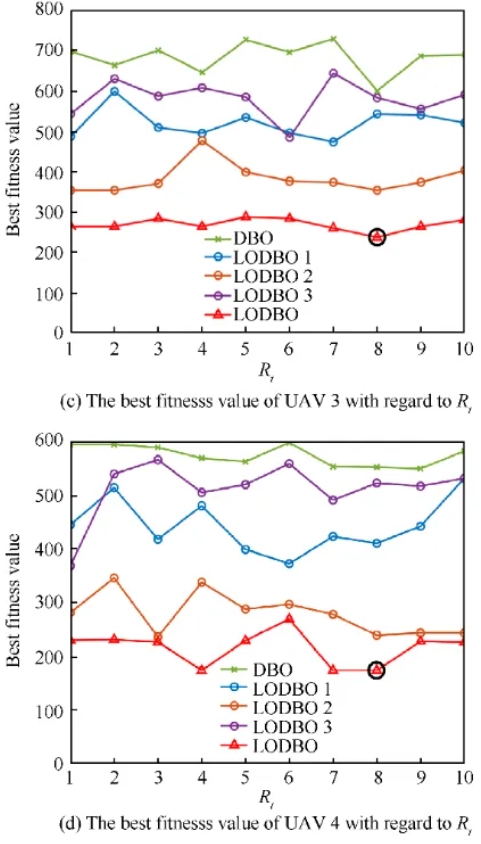
图6 LODBO算法参数敏感性研究
研究意义
LODBO算法的提出为灾区搜救提供了一种更高效、更精准的路径规划方法。该算法不仅提升了多无人机搜救任务的执行效率,还为未来无人机群体智能任务的优化提供了新的思路。随着通信技术和协作机制的不断进步,LODBO算法有望在更大规模的无人机群体和更复杂的地理环境中得到应用,进而为应急救援、灾害管理及其他关键领域提供强有力的技术支持。
作者介绍
杨丽曼,工学博士,北京航空航天大学自动化科学与电气工程学院副教授、硕士生导师。主持国家自然基金等30余项;获省部级科技奖励5项;发表SCI论文20余篇,授权国家发明专利12项。
张翔宇,北京航空航天大学自动化科学与电气工程学院研究生。
李治枰,北京航空航天大学自动化科学与电气工程学院研究生。
黎磊,工学博士,北京航空航天大学自动化科学与电气工程学院副教授、硕士生导师。主持国家自然科学基金、中国博士后科学基金项目等4项,以第一/通信作者在MSSP、RESS、TIM等中科院TOP期刊发表论文10余篇,获省部级科技进步一等奖1项、中国仪器仪表学会科技进步二等奖2项。
石岩,国家级领军人才,工学博士,北京航空航天大学自动化科学与电气工程学院教授、博士生导师。获国家科技进步二等奖1项(第二完成人)、省部级一等奖1项(第一完成人);主持/参与制修订ISO国际标准4项、GB国家标准11项;发表SCI论文90余篇,出版专著4部,授权国家发明专利30余项。
(来源:航空学报CJA 供稿:张翔宇 审核:蔡斐,滕雄)
编辑:贾爱平