北航新闻网9月5日电(通讯员 彭谨哲)近日,能源与动力工程学院漆明净教授团队在《Joule》期刊Future Energy专栏发表题为《Energy, Power, and Actuation Systems for Sustained Untethered Flight in Gram-Scale Aerial Vehicles》的前沿文章。文章系统梳理了克级微型飞行器(Micro Aerial Vehicle, 以下简称MAV)的瓶颈与前沿突破,提出实现超长续航乃至“无限续航”的能量自持飞行理论,并展望了未来技术创新方向。
随着无人机和机器人在环境监测、应急搜救及空间探测等领域的应用不断扩展,尺寸更小、质量更轻、机动性更强的微型飞行器需求持续增长。然而,目前克级MAV的续航时间普遍不足10分钟,难以满足实际长期作业和复杂任务的需求。这主要由于机载能源系统受体积和质量的严重约束,以及小型电磁电机效率在减小尺寸后效率大幅下降。本论文由能源与动力工程学院彭谨哲、杨翔宇、申威为共同第一作者,漆明净教授为通讯作者,北京航空航天大学能源与动力工程学院为第一(唯一)完成单位。
决定微型飞行器续航能力的主要因素在于力效(Lift-to-Power Ratio),即单位功率所能产生的升力。受尺寸定律、转子动力学与仿生驱动频率失配等因素影响,克级MAV难以通过提升锂电池能量密度或电机性能实现根本性突破。为此研究人员开发了压电驱动器、介电弹性体驱动器和静电驱动器等新型驱动器,能够在极小体积和质量下大幅提高力效和能量利用效率。
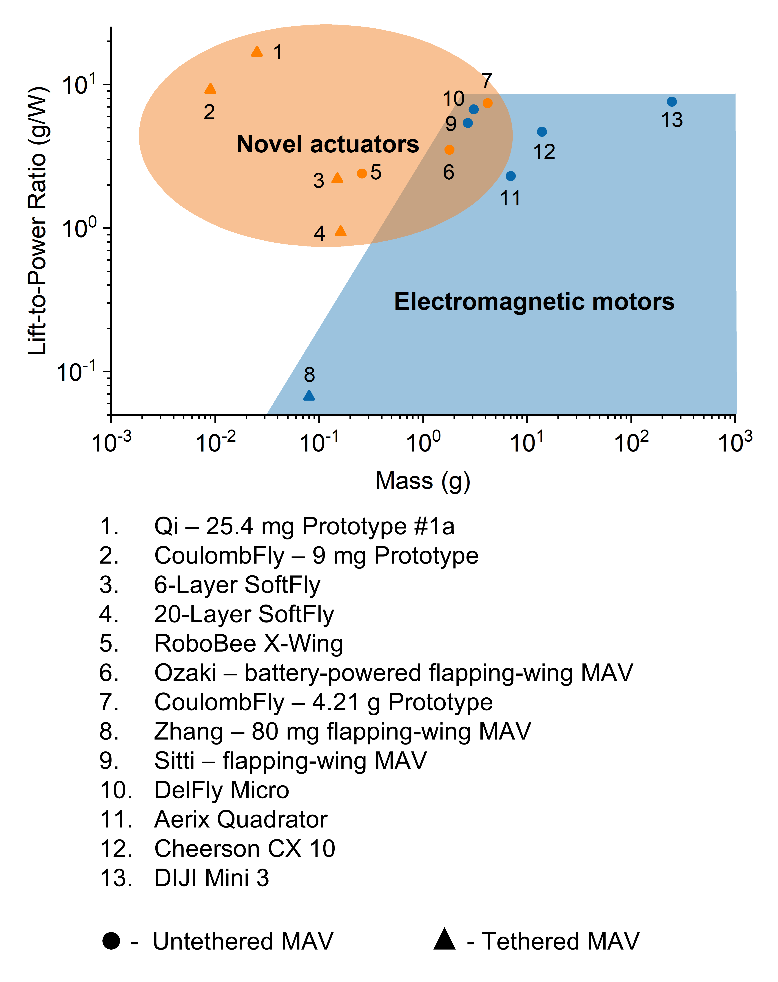
搭载不同驱动器的微型飞行器的力效
压电驱动器、介电弹性体驱动器和静电驱动器已相继取得进展并实现了不同程度的飞行。考虑到这些驱动器高电压、低电流的工作特性,论文进一步分析了其对于超小型高升压功率系统和电路可靠性的高要求,目前相关技术正面临着升压电路尺寸与能耗之间的挑战。
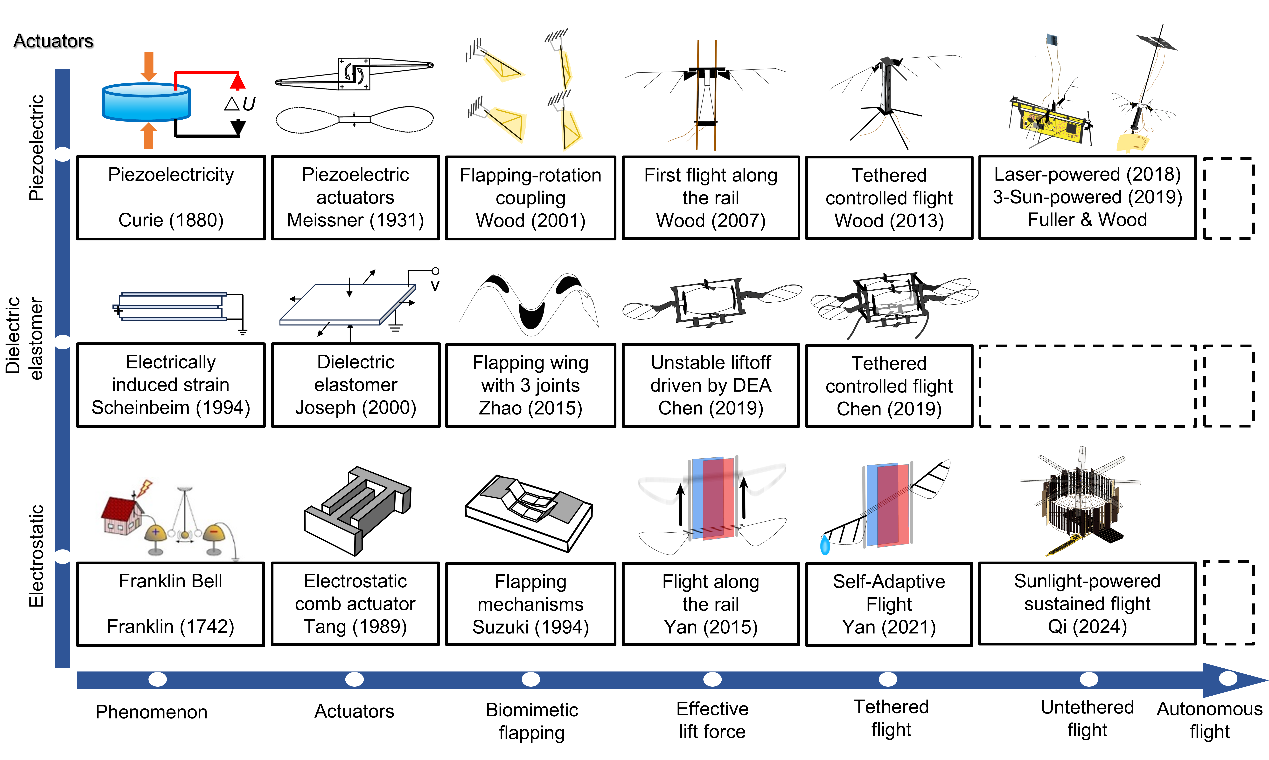
高力效新型驱动器的发展过程
在能源系统选型方面,锂电池作为现阶段主流机载能源,能量密度已达300Wh/kg,并接近理论极限。电容器在高功率输出方面有一定优势,但受限于总能量存储。化学燃烧与爆炸等方式尽管能量密度极高,但存在精准控制和安全复用的难题。外部能源输入技术,如太阳能、射频与激光等,为实现小飞行器理论上的“无限续航”提供了可能性,但在实际应用中依赖于环境条件、能量转换效率及飞行器极致轻量化的结构要求,目前距离实用仍有差距。
针对未来MAV续航提升,研究团队提出了多项关键技术路线:首先,推动能源系统迭代升级,持续关注具有更高理论能量密度的新型化学电池,如锂-硫、锂-空气等类型,并结合柔性薄膜太阳电池、集成式微型电容器等手段,追求机载能源“轻量与高效并重”;其次,开发支撑高压驱动器需求的轻量化功率系统,通过集成超小型高效升压电路,优化半导体与变压器设计,并采用零电压或零电流切换等智能控制策略,目标将升压系统每瓦功率对应的质量控制在4克以内;再次,实现结构、能源与机载电路的“三位一体”集成,通过柔性材料与功能复合技术,使太阳能电池、本体结构及PCB线路协同兼容,从而有效降低整体重量,并提升集成度与可靠性,进一步扩展MAV的载荷与任务能力;最后,重视环境能量的多元化耦合开发,综合利用光照、温差、大气电能等,探索新型自给能源方式(如摩擦纳米发电TENG),以提升飞行器在昼夜及恶劣天气下的续航能力与作业可靠性。
伴随先进新材料、电源系统和集成设计理念落地,不久的将来,基于力效极致优化的克重级微型飞行器,将有望突破续航极限,在极端救援、空间科学、精准物流等多个领域大显身手。
附:作者团队简介

彭谨哲 北京航空航天大学能源与动力工程学院2022级博士研究生
2017年本科就读于北京航空航天大学能源与动力工程学院,2021年于北航能动学院攻读硕士学位,并于2022年通过硕博连读攻读博士学位,博士生导师为漆明净教授。从本科毕设到博士,一直进行高压变换器和柔性电路方面的研究。

杨翔宇 北京航空航天大学能源与动力工程学院20级博士生
2014年本科就读于北京航空航天大学能源与动力工程学院,2019年于北航能动学院攻读硕士学位,并于2020年通过硕博连读攻读博士学位,博士生导师为漆明净教授。从本科毕设到博士,一直进行静电吸附和微型机器人的研究。

申威 北京航空航天大学能源与动力工程学院2021级博士研究生
2015年本科就读于北京航空航天大学能源与动力工程学院,2019年于北航能动学院攻读硕士学位,2021年通过硕博连读攻读博士学位,并于2025年获得博士学位证书。本科到博士研究期间,一直进行静电电机和微型飞行器方面的研究。

漆明净 北京航空航天大学能源与动力工程学院教授、博士生导师
美国加州大学Berkeley分校博士后。长期从事微型机器人的推进与控制研究,在Nature、Science Robotics、Nature Communication、Joule、IEEE Transactions on Robotics等高水平期刊发表论文60余篇,授权发明专利20余项。主持国家自然科学基金面上项目、青年项目以及某工程创新特区项目,入选留学基金委“未来科学家”计划,获得2024年某部委颠覆式突破奖。担任Nature正刊审稿人,教育部第五轮学科评估专家。
(审核:李果)
编辑:贾爱平