北航新闻网6月17日电(通讯员 王丹)近日,机械工程及自动化学院仿生与微纳系统研究所罗斯达教授团队在《Science Advances》期刊发表《Hierarchical laser-programmed soft actuators for designing bionic robots with freeform morphing shapes》研究论文。该研究提出了一种空间差异化激光编程技术,通过数字化制造赋予激光诱导石墨烯软执行器(LIG-SA)自由形态变形能力,突破了传统刺激响应材料在制造简便性与运动复杂性之间的设计权衡,为下一代仿生软体机器人提供了新路径。2023级博士研究生锅雨寒与北航师资博士后韩明光为本论文的共同第一作者,罗斯达教授为唯一通讯作者,北航机械学院为第一单位。该论文被《Science Advances》期刊官网选为首页论文进行推介。

研究团队通过交叉调控激光能量与扫描方向,实现了对材料异质性与结构层次性的协同设计,从而在单一LIGSA中引入了解耦的电热分布与刚度各向异性。基于此,团队成功编码出四种基本运动单元:弯曲、螺旋、刚性支撑与柔性连接。通过对这些多模态变形单元进行任意组合,可进一步设计出具备章鱼触手缠绕、尺蠖蠕动、海豹爬行等复杂运动形态的仿生器件。

图1 空间差异化激光制造LIG-SA的跨层级设计策略:从局部编程到器件组装的自由形态变形软机器人
通过调控激光聚焦/离焦状态与划线方向,可在不同区域独立控制执行器的弯曲、螺旋与刚度特性。例如,在低电阻驱动器中引入高电阻区,可产生关节式局部弯折;而改变激光划线角度,则可使执行器从平直弯曲逐步演变为螺旋卷曲或完全锁定为刚性支撑。这些基本动作单元的灵活组合,赋予了执行器丰富的变形姿态。
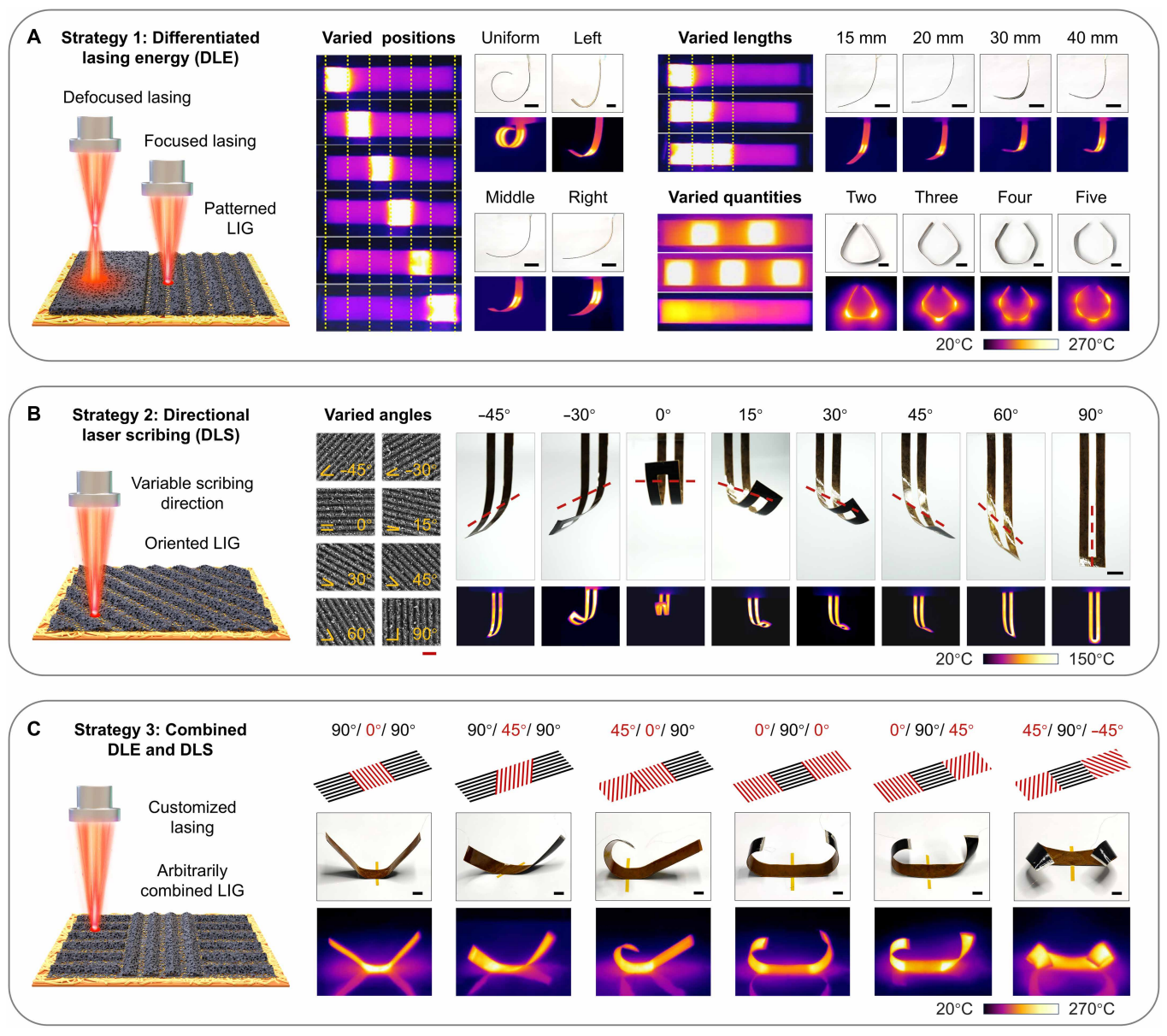
图2创新加工策略:差异化激光能量(DLE)与定向激光划线(DLS)对LIG-SA变形姿态的精确调控
图3 具有多种定制变形姿态的交叉致动器
基于上述技术,团队设计并制造了多种仿生机器人系统。团队开发的仿生爬行机器人,尺蠖仿生爬行机器人采用双段独立驱动结构,通过交替弯曲与锚定,实现了稳定的双向直线爬行。海豹仿生爬行机器人则利用一对离散肢体单元的交替螺旋变形,完成圆周方向的转向移动。在此基础上进一步发展的全向爬行机器人,通过协调两个前肢与后肢的弯曲/螺旋动作,实现了直线爬行与左右转向的解耦多模式运动。在多功能任务执行方面,机器人还在模拟的城市管道故障场景中依次完成了蜿蜒爬行、转向、跨隙、融冰破壁、故障定位与电路修复等任务,充分展示了其在极端环境下的高适应性与实用性。
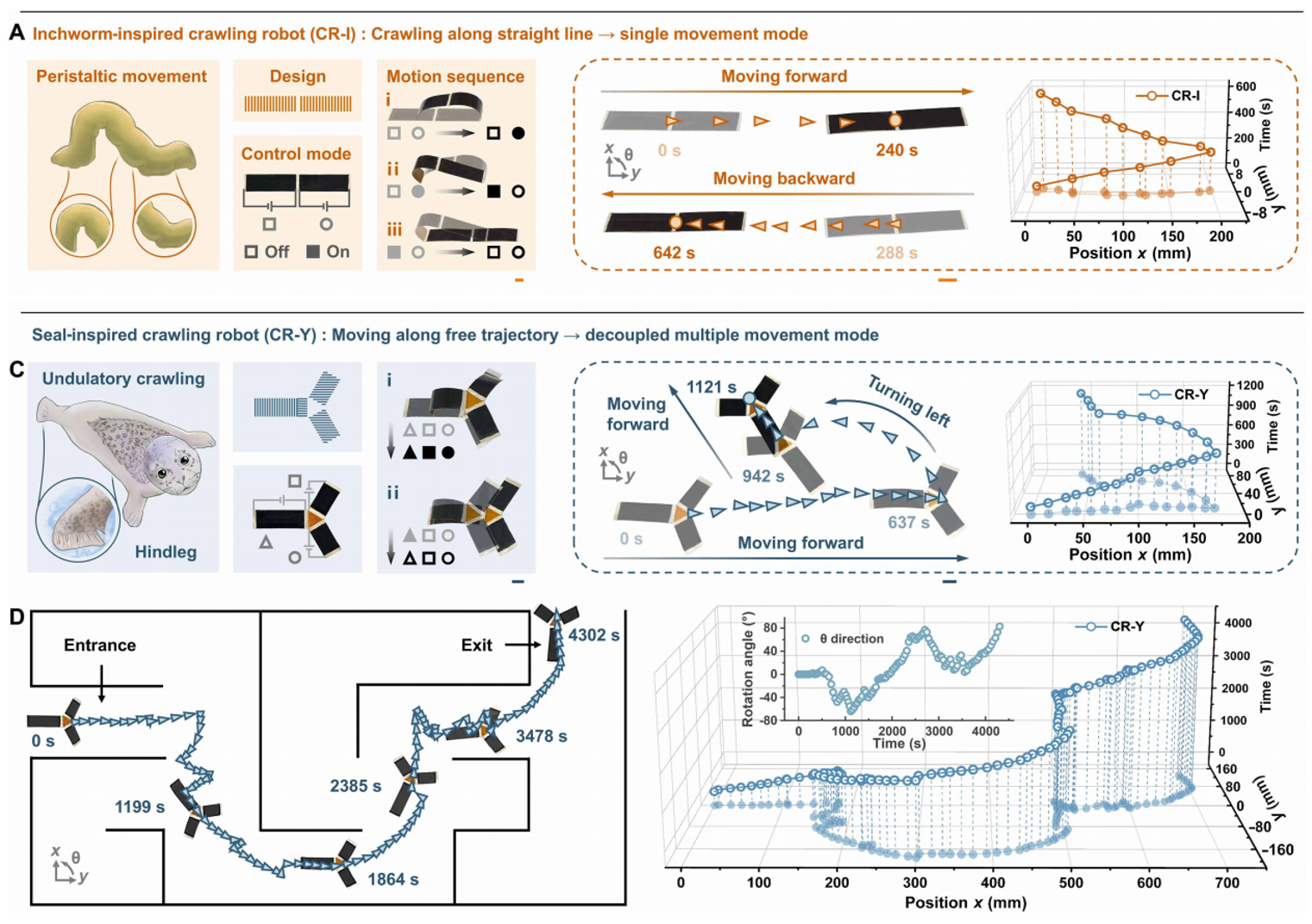
图4 尺蠖与海豹仿生爬行机器人:实现双向直线运动与全方向转向
图5 海豹仿生爬行机器人:在低温管道中执行冰壁融化、狭缝跨越、路线调整与电路恢复等多任务避障任务
该研究受国家自然科学基金创新群体项目(T2121003,第一标注)、面上项目(62371025)以及博新计划A类项目(BX20240460)等支持。
原文链接为:https://www.science.org/doi/10.1126/sciadv.aeb1989
(审核:从保强)
编辑:贾爱平